友情链接

时间:2017/11/08 来源:专业视听网
关键词:

近是,摄影指导Scott Sorensen用BMD公司研发的Micro Cinema Cameras和URSA Mini 4.6K数字电影摄影机为美国机器人公司MegaBots Inc.拍摄了一部网络剧。MegaBots利用尖端的机器人技术打造了16英尺高的巨型内部驾驶人形机器人。
两年前,MegaBots公司向日本机器人公司水道桥重工发出挑战,要求进行一场巨型机器人世纪决斗,水道桥重工团队接受了这一挑战。在这部网络系列片的第一集中,MegaBots认为该公司现有的Mk. II型机器人不适合格斗,并决定不再修改现有的机器人,而是重新打造一部新的机器人,而这部系列片记录了记录了全新机器人Eagle Prime的研发、测试以及最终完工。该片在MegaBots公司Eagle Prime与水道桥重工Kuratas巨型机器人的决斗中进入高潮。
“MegaBots在网上有很多粉丝。人们期待在现实生活中看到科幻小说中的巨型机器人决一雌雄。这部网络系列片的目的是向观众展示人们如何为这些机器赋予生命。”Sorensen说,“在这个片子的开始,我们大致交代了这部机器人构造中的重要部分。每当机器人要安装的新零件时,我们都会来一个小摄制组来记录这个过程。每次MegaBots团队拿出一种新的机器人系统,这些被组装在一起的零件就会按照新的方式运行一次。万一出现失败,我们必须记录任何可能出现的结果,因此得有各种各样的摄影机,360度全方位地捕捉每个角度的镜头。”
为了捕捉每个可能需要的角度,Sorensen用了六台Micro Cinema Camera,因为这款机器有紧凑的外形,配有扩展口,能提供胶片感的画面。“我选用Micro Cinema Camera的主要原因是它有扩展端口。我知道我最后肯定会在机器人驾驶舱内部安装摄影机。通过这些摄影机的扩展端口,我能通过RC无线电遥控器遥控摄影机的启动和停止,并通过机器人本身所提供的AC交流电源为它们充电。”他说。

在整个拍摄过程中,一台URSA
Mini 4.6K作为B机被多次用于升格拍摄。“在记录几次机器人测试时,我用URSA Mini 4.6K录慢动作,同时操作一台稳定器上的Micro Cinema
Camera,”Sorensen介绍说。

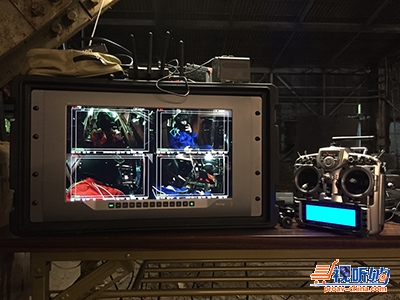
Sorensen的工作流程中还包含了Blackmagic Design的MultiView 4多画面分割器、SmartView 4K监视器以及许多Micro Converter HDMI to SDI。在决斗过程中,每部机器人都安装 了多台Micro Cinema Camera摄影机,每台摄影机的信号输出给Micro
Converters HDMI to SDI转换器,然后再被发送到两台MultiView 4。MultiView 4再通过无线视频解决方案,将多画面分割图像发送到片场监视区的SmartView
4K监视器上,让Sorensen可以确定每台摄影机响应了遥控触发系统。这个遥控摄影机触发系统由一个RC无线电发射器,和两个接收器组成;每部机器人都配备一个。在接收器上,Sorensen为每个Micro Cinema Camera的扩展端口都连接了一条伺服线缆。然后每台摄影机对应发射器上的一个开关。
“机器人中的遥控监看/控制系统用市面上常见的零件就可以做出来。这套系统在片场节省了大量的时间,而且通过它,我们可以确保这些摄影机在机器人格斗时都在工作,而且记录到了所有的击打和冲撞,让人放心。”Sorensen说。
Sorensen还提到:“由于Micro
Cinema Camera的外形非常小,所以很容易把它们安装在驾驶舱封闭而狭小空间里。当我们测试Eagle
Prime时,我们也将摄影机固定在C形架和魔术臂上,还有一台摄影机安装在运动控制滑轨上,另一台则固定在稳定器上,还有一台则装置在摇臂上。”

Sorensen还评价了Micro Cinema Camera的耐用性。“当拍摄第一集的时候,我们正在测试机器人投掷55加仑油桶的能力。很倒霉,突然一个不受控制的大油桶从天而降,直接砸中安装在运动控制滑轨上的Micro Cinema Camera。这个大桶把镜头都撞掉了,但只是轻微地损坏了滑轨,摄影机一点问题都没有。这些小家伙真的很皮实。”他最后说道。
