


经营范围:教育录播(数字跟踪录播教学系统、远程互动教学解决方案、高清手术示教方案、企业/政府会议录播方案)、视频监控(高清网络球型摄像机、高清网络半球摄像机、高清网络枪型摄像机)、视频会议(4K超高清会议摄像机、广播级摄像机、高端会议摄像机、高清会议摄像机、180度全景摄像机)、视频处理及更多视频中心。
地 区:广东省深圳市南山区前海路0101号丽湾大厦A901-913
联系电话:13500000000
创建时间:2016-01-01

汉锐股份专利:高清会议自动跟踪摄像机
近年来,随着计算机、网络以及图像处理、传输技术的飞速发展,视频监控技术在交通、公安、教育、会议等多个领域有了新的突破,而全自动跟踪识别技术也有了长足的发展。在此背景下,汉锐股份紧跟时代步伐,推出一系列技术解决方案,其中摄像机自动跟踪就是一种利用图像处理,实现目标发现并控制摄像机对运动目标在一定场景范围内进行定位、跟踪和抓拍的监控技术。
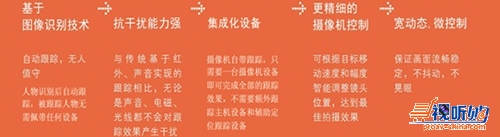
汉锐全自动跟踪识别摄像机采用摄像头对目标进行跟踪的方法,其特征在于包括如下步骤:将摄像机的焦距变化范围划分为多个层次尺度,将每个层次尺度下的全景分别划分为一个部分场景的集合,并分别为每个部分场景建立背景模型,捕获当前视频帧,提取当前视频帧的ORB特征点,并分别找到每个层次尺度中与所属当前视频帧的ORB特征点匹配的部分场景,并使用被匹配的部分场景检测所属当前视频帧的前景物体,利用所属当前视频帧的前景物体的检测结果优化跟踪结果,并根据所属跟踪结果调整所属摄像机,使跟踪目标保持在监控画面中。
摄像机提取每个关键帧的特征点,通过左右转动和上下转动找到当前关键帧在下一层次尺度有相同的关键帧,寻找所属相邻关键帧中与所属当前关键帧的特征点对应的点,通过所属对应的点计算所属当前关键帧和相邻关键帧之间的转化矩阵,并存储所属转化矩阵,将所属当前关键帧和相邻关键帧的图像四个角分别映射到各自的图像平面并存储,提取并存储所有关键帧的ORB特征点以确定视频帧的相邻关键帧集。
提取所属视频帧的ORB特征点,并将所属视频帧的ORB特征点与所属关键帧的ORB特征点进行匹配定位,找到匹配的关键帧。
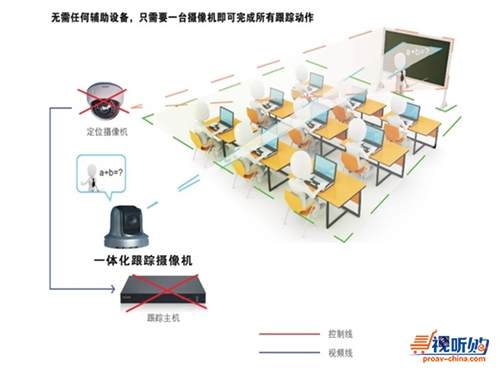
使用云台图像识别跟踪摄像机对目标进行自动跟踪的方法

背景技术
图像跟踪系统的重要组织部分,它是一种利用图像人脸进行识别跟踪能力较强的综合系统。以其直观、准确、及时和信息内容丰富而广泛应用于许多场合。近年来,随着计算机、网络以及图像处理、传输技术的飞速发展,视频跟踪技术也有了长足的发展。目前,根据系统使用的跟踪的种类不同,分为图像识别跟踪需要加跟踪主机来实现,红外跟踪,需要带红外辅助设备,超声波跟踪需要主机辅助。
汉锐图像摄像机跟踪技术是一种利用图像处理技术,实现目标发现并控制摄像机对运动目标在一定场景范围内进行定位、跟踪和抓拍的监控技术。这种技术可以用于教学、会议、监控等多个领域。
摄像机对于运动目标的跟踪技术是基于对监控场景的背景建模,从而发现进入场景中的目标,实现对目标在场景中的定位和跟踪。但是大多数的背景建模方法是针对固定摄像机的。因为固定摄像头监控同在一个地方的场景,每个像素点的变化可以独立建模,并且能够穷尽全局监控场景。而摄像机有更宽广的场景,但它不能在一个抓拍中穷尽全局监控场景,必须旋转捕捉全景(全局监控场景)的不同部分。此外,摄像机的旋转对通常用于背景模型的特征有很大的影响。
在背景模型中,所使用的特征是一个很重要的影响因素。局部纹理特征是一个很好的用于像素或像素块建筑的特征。利用局部二值模式(LBP)为特征,这个特征对光照变化有很强的鲁棒性。一种新型的尺度不变局部三元模式(SILTP)特征也被用于背景建模。
近年来,基于摄像机的背景模型吸引越来越多的研究兴趣。方法基于可分为两大类:帧到帧和帧到全景图(全景的背景图像)。帧到帧的方法,重点在于当前帧和前几帧的重叠区像素的重用。帧到前景图方法的重心在于建立一个全景图。帧到帧方法利用邻近帧进行帧的场景定位,可以使用对应图像失真较小,但定位精度会随着物体移动下降。此外由于缺乏全景信息,某些帧区域的前景图的方法使用缝合技术生成全景图,为前景检测提供全景信息。然而,这些方法提供的全景图可能包含有运动目标。一些缝合问题,例如严重的图像失真和重影,也可能产生。当创建全景图时,帧到全景图方法一般遵循这样的假设:没有显著的运动视差,即随着镜头的转动,场景深度变化是不明显的。是这样的假设在某些情况下不成立。而且全景图的更新过程更困难,代价更高。
如果用于匹配的特征点太少,帧的场景定位可能失败。一种多层次特征对应的传播方法可以产生足够的匹配特征点,它通过更大的计算量来实现更好的场景定位,但是图像失真会严重影响背景减除的结果,这样造成场景定位速度较慢、准确度不高。
跟踪主要解决的技术问题在于,针对现有技术的上述不能处理焦距变化、帧到全景图存在缝合问题、运动视差、更新模式代价高、场景定位速度较慢、准确度不高的缺陷,提供一种能处理焦距变化、能避免缝合问题和运动视差问题、降低了更新模型的代价、场景定位速度较快、准确度较高的使用摄像机对目标进行自动跟踪的方法及装置。
使用跟踪摄像机对目标进行自动跟踪的方法及装置,具有以下有益效果;由于将摄像机的焦距变化范围划分为多个层次尺度,将每个层次尺度下的全景分别划分为一个部分场景集合,并分别为每个部分场景建立背景模型,由部分场景的集合就能提供全景信息,通过提取当前视频帧的ORB特征点,并分别找到每个层次尺度中与当前视频帧的ORB特征点匹配的部分场景,并使用被匹配的部分场景检测当前视频帧的前景物体,采用ORB特征点进行匹配,这样就解决帧到帧方法缺乏全景信息,不能处理焦距变化问题,也解决了帧到全景图方法的缝合问题、运动时差问题和更新模型代价高的问题,所以其能处理焦距变化、能避免缝合问题和运动视差问题、降低了更新模型的代价、场景定位速度较快、准确度较高。
附图说明
为了更清楚地说明本产品现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图做简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
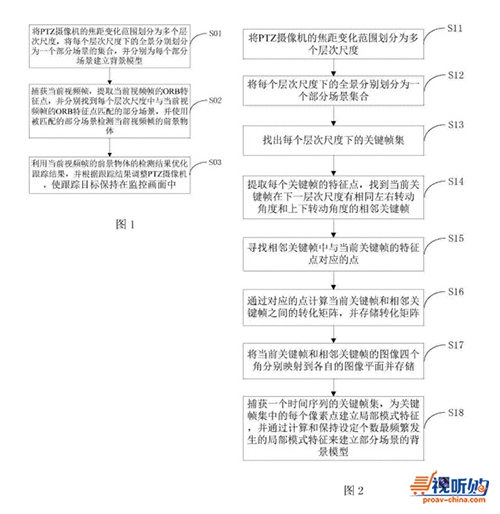
图1为摄像机对目标进行自动跟踪的方法及装置一个实施例中方法的流程图;
图2为摄像机的焦距变化范围划分为多个层次尺度,将每个层次尺度下的全景分别划分为一个部分场景的集合,并分别为每个部分场景建立背景模型的具体流程图;
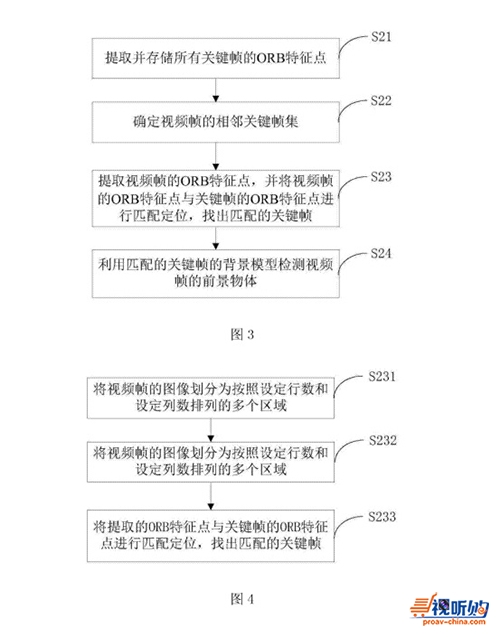
图3为捕获当前视频帧,提取当前视频帧的ORB特征点,并分别找到每个层次尺度中与当前视频帧的ORB特征点匹配的部分场景,并使用被匹配的部分场景检测当前视频帧的前景物体的具体流程图;
图4为提取视频帧的ORB特征点,并将视频帧的ORB特征点与关键帧的ORB特征点进行匹配定位,找出匹配的关键帧的具体流程图;

图5为利用当前视频帧的前景物体的检测结果优化跟踪结果,并根据跟踪结果调整所属摄像机,将当前景物体定位到监控画面中的具体流程图;
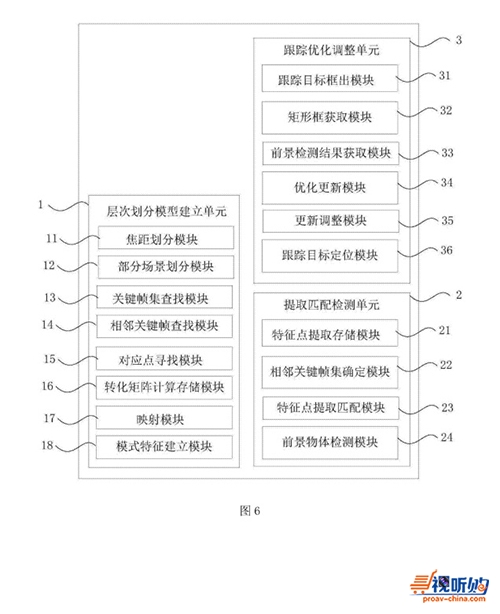
图6为所属实施例中装置的结构示意图;
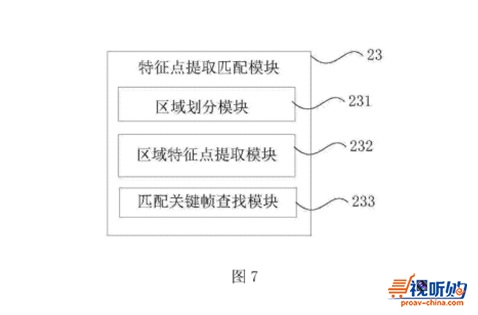
图7为所属实施例中特征点提取匹配模块的结构示意图。
注:本文由汉锐股份供稿